Our Mission
We aim to transform the workforce by providing a transparent and lightweight garment that offers “POWERS” to safely execute strenuous tasks. Our technology seeks to:
Enhance Well-being: Reduce overexertion injury risks and support those suffering from Rheumatic and Musculoskeletal Diseases (RMDs).
Future-proof Jobs: Improve work performance and efficiency, keeping workers in charge of their lives for longer.
Innovate Holistically: Move beyond isolated joint assistance to provide a complete, poly-articular upper-limb solution.
Core Research Areas
Human-in-the-Loop Design: Ensuring the exosuit conforms to intricate human kinematics and provides personalized assistive forces (5-25% of muscle effort)
Fabric-Based Soft Robotics: Utilizing the mechanical anisotropy of high-strength fabrics to create collapsible, high-power-to-weight ratio actuators.
Distributed Sensing & Control: Implementing a network of embedded soft sensors and model-free adaptive control to track user intent in real-time.
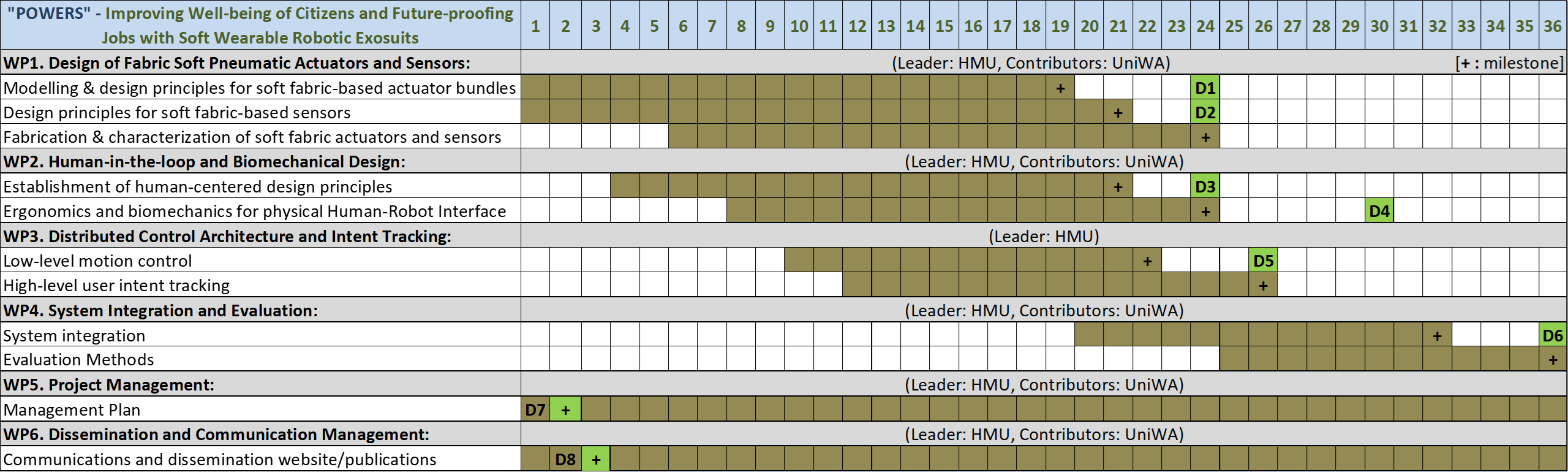
Methodology
- WP1: Design of Fabric Soft Pneumatic Actuators and Sensors.
- WP2: Human-in-the-loop and Biomechanical Design.
- WP3: Distributed Control Architecture and Intent Tracking.
- WP4: System Integration and Evaluation.