Category: Publications and Outcomes
-
New Publication: Design Optimization of Soft Fabric Pneumatic Actuators
We are pleased to announce our latest publication, “Design Optimization of Soft Fabric Pneumatic Actuators,” recently published in the journal Advanced Intelligent Systems. Soft fabric pneumatic actuators are a key enabling technology for wearable soft robotic systems, offering lightweight, compliant, and comfortable assistance for human movement. However, designing actuators that simultaneously provide high force output,…
-

H.F.R.I. POWERS presented at ICRA 2026 Workshop on Wearable Robotics
We are pleased to announce that our research on the H.F.R.I. POWERS project was presented at the workshop “Tailored to Move: Wearable Robotics for Motion Assistance“ during the IEEE International Conference on Robotics and Automation (ICRA) 2026 in Vienna, Austria. The workshop brought together leading researchers working on wearable robotics, exoskeletons, and human-assistive technologies, providing…
-
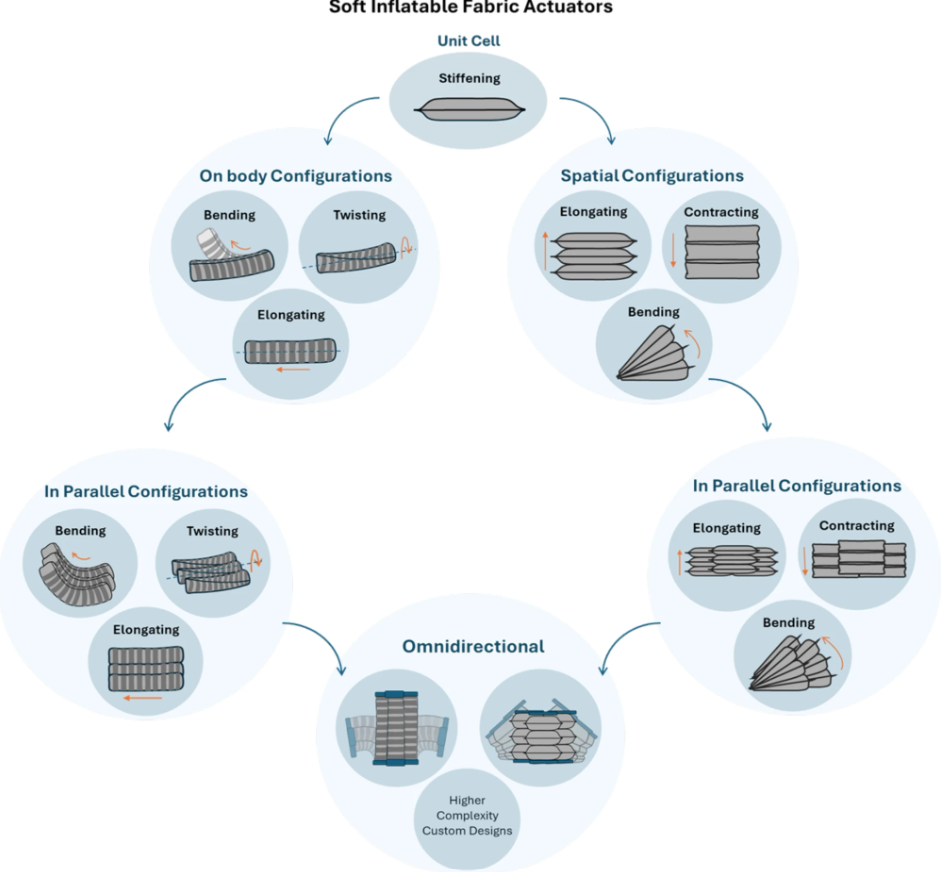
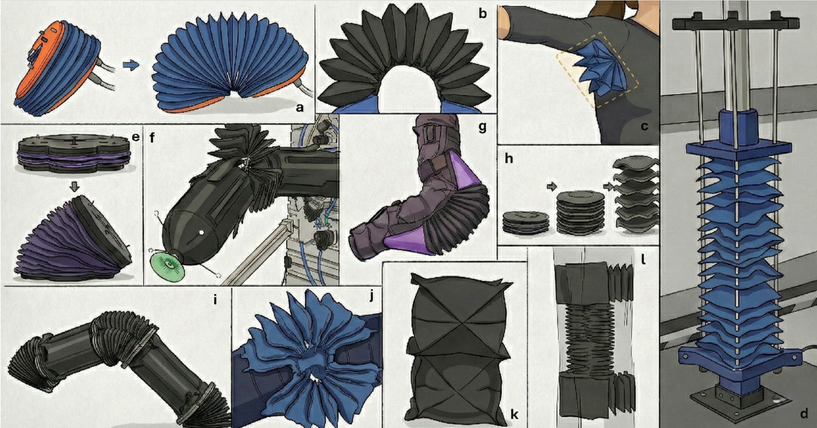
First Publication from the POWERS Project on Soft Inflatable Fabric Actuators
We are excited to share the first scientific publication from the POWERS project, which aims to develop a soft exosuit designed to assist movements of the upper limbs. The paper, “A unified framework for soft inflatable fabric actuators,” explores one of the core technologies that can enable lightweight and comfortable wearable robotic systems. Soft inflatable…