We are excited to share the first scientific publication from the POWERS project, which aims to develop a soft exosuit designed to assist movements of the upper limbs. The paper, “A unified framework for soft inflatable fabric actuators,” explores one of the core technologies that can enable lightweight and comfortable wearable robotic systems.
Soft inflatable fabric actuators are flexible components made from textile materials that inflate with air to produce motion. Because they are soft and lightweight, they are particularly promising for wearable robotics, where safety and comfort are essential. However, as these actuators become more sophisticated, designing and predicting their behavior becomes increasingly challenging.
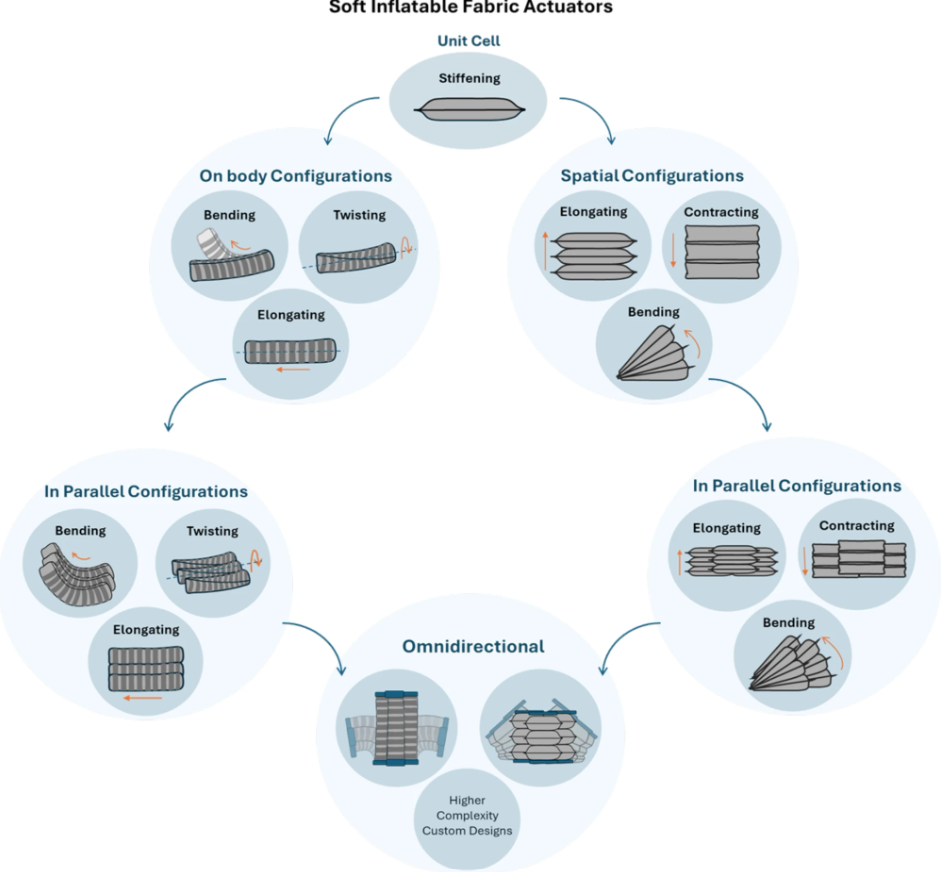
In this work, we propose a unified framework that describes many different actuator designs using a common building block. By combining these building blocks in different ways, complex motions such as bending, contraction, or extension can be modeled and predicted. This approach allows researchers and engineers to design new actuators more efficiently, without relying on extensive trial-and-error or computationally intensive simulations. The framework ultimately supports the development of advanced soft robotic technologies for wearable systems, biomedical devices, and other adaptive structures.
📄 Read the paper: A unified framework for soft inflatable fabric actuators